动态规划算法通常用于求解具有某种最优性质的问题 这类问题中, 可能会有许多可行解. 每一个解都对应一个值, 希望找到具有最优值的解
- 动态规划算法与分治法类似, 其基本思想也是将待求解问题分解成若干个子问题, 先求解子问题, 然后从这些子问题的解得到原问题的解.
- 与分治法不同的是, 适合动态规划求解的问题, 经分解得到的子问题往往不是互相独立的. 用分治法得到的子问题数目太多, 有些子问题被重复计算了很多次, 如果能保存已解决的子问题的答案, 而在需要的时候找出已求得的答案, 就可以避免重复大量的计算
动规五部曲
- 理解dp数组的含义,以及下标的含义
- 得到递推公式
- dp数组如何初始化
- 确定遍历顺序
- 当出现问题了,要学会打印dp数组
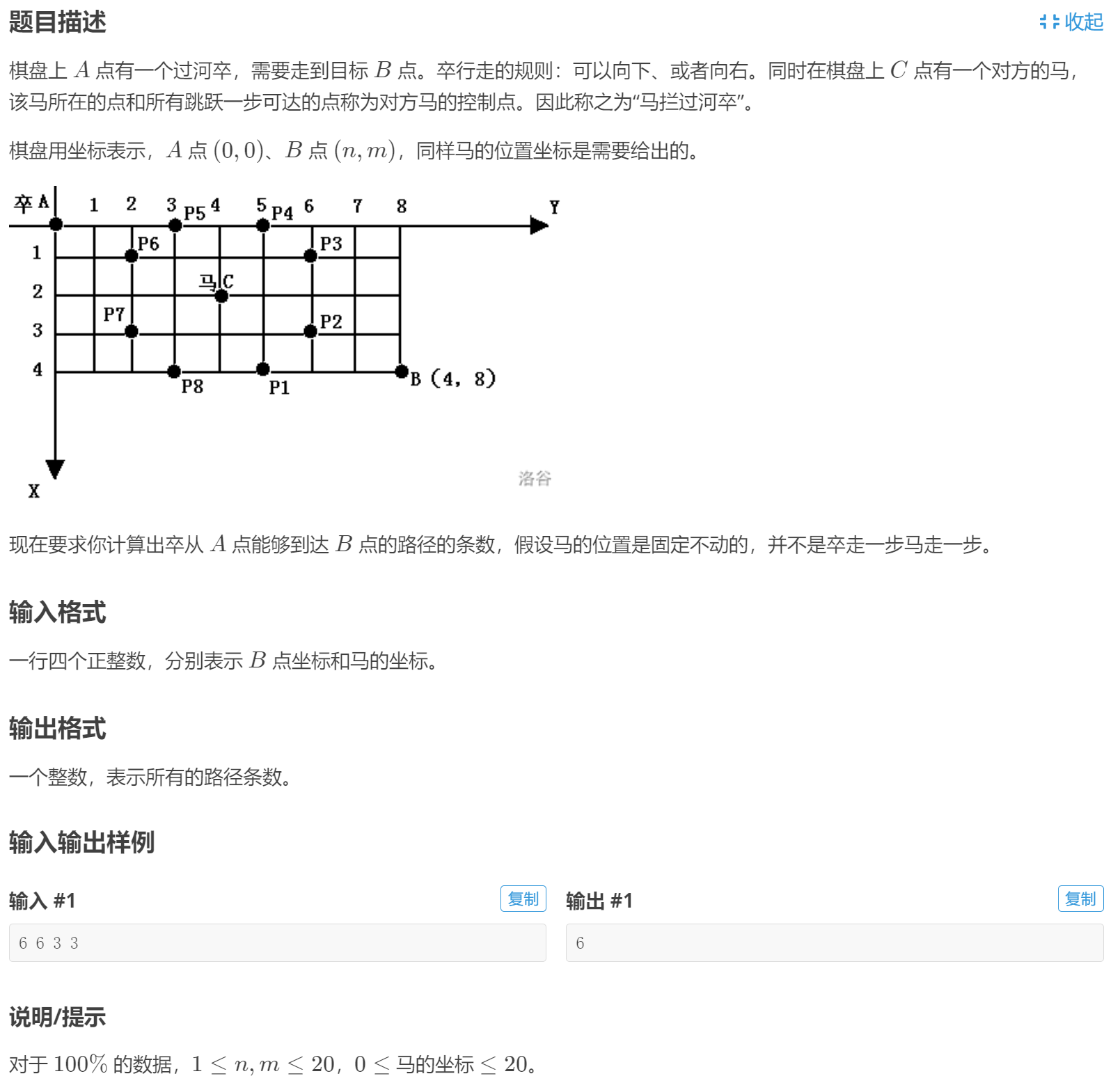
过河卒
 ❓ 为什么不能用广度搜索
❓ 为什么不能用广度搜索
- 实测20,20的时候跑不出来, 仔细想想, 因为结果要的是到终点的路径条数, 意味着每次经过一个点都要重复计算, 因为每重复算都是来自新的一条路, 所以考虑能不能不要重复计算
解题思路: 如果将每个点有个数组, 包含的是到这个点的路径条数有多少会怎样?
#include <bits/stdc++.h>
using namespace std;
const int MAXN=21;
int dp[MAXN][MAXN];
int vis[MAXN][MAXN];
int zhx,zhy,mx,my;
int mal[][2]={
/*{0,0},*/{1,2},{1,-2},{2,1},{2,-1},{-1,2},{-1,-2},{-2,1},{-2,-1}
};
// bool iszhuang(int x,int y){
// for(int i=0;i<9;i++){
// if(x==mx+mal[i][0] && y==my+mal[i][1])
// return true;
// }
// return false;
// }
int main(){
cin>>zhx>>zhy>>mx>>my;
vis[mx][my]=1;
for(int i=0;i<8;i++){
int xt=mx+mal[i][0];
int yt=my+mal[i][1];
if(xt>=0 && yt>=0 && xt<=zhx && yt<=zhy) vis[xt][yt]=1;
}
dp[0][0]=1;
for(int i=0;i<=zhx;i++){
for(int j=0;j<=zhy;j++){
// if(!iszhuang(i,j)){
// if(i==0 && j!=0){
// dp[i][j]+=dp[i][j-1];
// continue;
// }else if(i!=0 && j==0){
// dp[i][j]+=dp[i-1][j];
// continue;
// }else if(i!=0 && j!=0){
// dp[i][j]+=dp[i-1][j]+dp[i][j-1];
// }
// }else{
// dp[i][j]=0;
// }
if(i) dp[i][j]+=dp[i-1][j];
if(j) dp[i][j]+=dp[i][j-1];
if(vis[i][j]) dp[i][j]=0;
}
}
cout<<dp[zhx][zhy];
return 0;
}最后一段注释, 考虑一下, 0不0的都可以用这样的语句简单完成